高价回收天宝,徕卡,拓普康,南方测绘,华测,中海达,千寻位置,合众思壮,司南,北斗星通等品牌RTK,平台直营回收,无中间商赚差价,欢迎咨询合作!
高价回收天宝,徕卡,拓普康,南方测绘,华测,中海达,千寻位置,合众思壮,司南,北斗星通等品牌RTK,平台直营回收,无中间商赚差价,欢迎咨询合作!
高价回收天宝,徕卡,拓普康,南方测绘,华测,中海达,千寻位置,合众思壮,司南,北斗星通等品牌RTK,平台直营回收,无中间商赚差价,欢迎咨询合作!
高价回收天宝,徕卡,拓普康,南方测绘,华测,中海达,千寻位置,合众思壮,司南,北斗星通等品牌RTK,平台直营回收,无中间商赚差价,欢迎咨询合作! 1973年12月,美国国防部批准陆海空三军联合研制新的卫星导航系统NAVSTAR/GPS。英文“Navigation Satellite Timingand Ranging/Global Positioning System”的缩写词,意为“卫星测时测距导航/全球定位系统”,简称GPS系统。该系统是以卫星为基础的无线电导航定位系统,具有全能性(陆地、海洋、航空和航天)、全球性、全天候、连续性和实时性的导航、定位和定时的功能。能为各类用户提供精密的三维坐标、速度和时间。
GPS系统利用设置在地面或运动载体上的专用接收机,接收卫星发射的无线电信号实现导航定位。GPS系统由三部分组成,即空间的卫星星座,地面控制系统,用户的接收处理装置。
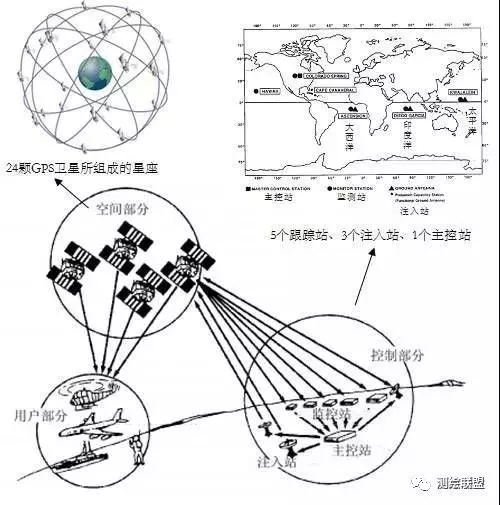
GPS系统组成图
空间部分有24颗卫星,其中21颗为工作卫星,3颗为备份卫星。
工作卫星均匀分布在20200km高的六个轨道平面上,运行周期为11小时58分(恒星时12小时)。
GPS卫星发射的信号由载波、测距码和导航电文三部分组成。GPS卫星所用可调制信号的高频振荡波——载波有两个,由于它们均位于微波的L波段,故分别称为L1载波和L2载波。测距码是用于测定从卫星至接收机间的距离的二进制码,属于伪随机噪声码。测距码分为粗码(C/A码)和精码(P码或Y码)两类。C/A码只调制在L1载波上,P码同时调制在L1和L2载波上。导航电文是由GPS卫星向用户播发的一组反映卫星在空间的位置、卫星的工作状态、卫星钟的修正参数、电离层延迟修正参数等重要数据的二进制码,也称数据码(D码)。
地面控制系统由一个主控站、五个监控站和三个注入站组成,任务是保证卫星导航数据的质量。用户的接收装置由天线、接收机、计算机和数据处理软件等组成。
除美国的GPS系统外,前苏联于1996年建成了GLONASS全球导航卫星系统,欧盟于2002年开始建设伽俐略(Galileo)系统。
我国于2000年底发射了两颗“北斗导航试验卫星”,开始建立我国的北斗卫星导航系统。北斗卫星导航系统﹝BDS,BeiDou(COMPASS)Navigation Satellite System﹞是中国正在实施的自主发展、独立运行的全球卫星导航系统。系统建设目标是建成独立自主、开放兼容、技术先进、稳定可靠的覆盖全球的北斗卫星导航系统,促进卫星导航产业链形成,形成完善的国家卫星导航应用产业支撑、推广和保障体系,推动卫星导航在国民经济社会各行业的广泛应用。

北斗卫星导航系统由空间段、地面段和用户段三部分组成,空间段包括5颗静止轨道卫星和30颗非静止轨道卫星,地面段包括主控站、注入站和监测站等若干个地面站,用户段包括北斗用户终端以及与其他卫星导航系统兼容的终端。
2013年向亚太区域提供正式运营服务,根据系统建设总体规划,2020年左右建成覆盖全球的北斗卫星导航系统,实现全球导航定位服务功能。
RTK的诞生
RTK是Real Time Kinematic的简称,翻译成中文的意思为“实时动态测量”。
RTK技术起源于上世纪90年代初,由美国天宝(Trimble)公司发明。据美国天宝公司网站www.trimble.com公司历史记载:在1992年,天宝公司开发了实时动态测量(RTK)技术,实现了在移动中GPS数据的瞬时更新。对于测量人员来说,这是革命性的变化,从此GPS设备可以实时进行地形测量、放样、GIS数据采集和竣工测量。(“In 1992,Trimble developed real-time kinematic(RTK) technology, allowingmoment-by-momentGPS updates while on the move. For surveyors,this wasrevolutionary; GPS equipment now enabled them to dotopographic mapping, stakeout,Geographic Information System (GIS) data acquisition, and as-built surveysin real-time.”)
美国天宝公司1996年5月10日申请,1997年2月11日发布的专利U.S.P.No.5602741《用于实时动态测量的厘米级精度GPS接收机》(《Centimeter accurate global positioningsystem receiver foron-the-fly real-time kinematic measurement and control》)中参考文献中有如下记载:“在GPS硬件和软件方面的进展”,1992年6月25-26日天宝导航在澳大利亚悉尼召开的GPS测量全国性会议上提出。(“Recent Advances in GPS Hardware & Software”,Trimble Navigation. Presented at National Conference on GPSSurveying;Sydney,Australia,Jun.25-26,1992. )
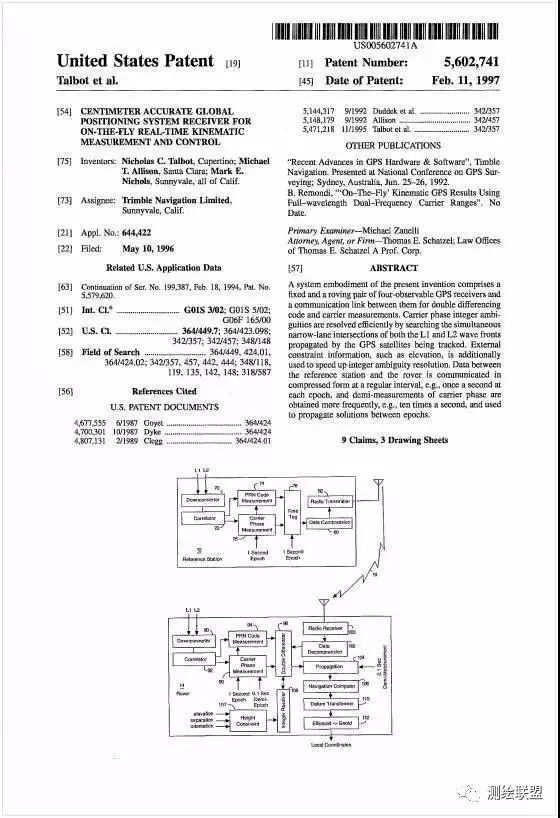
美国大地测量局大地测量学家B.Remondi:“利用全波长双频载波相位的GPS动态初始化结果”,(B.Remondi,“‘On-The-Fly' Kinematic GPS ResultsUsing Full-wavelengthDual-Frequency Carrier Ranges”)。另据1995年8月15日发布的专利U.S.P.No.5442363中的也在相同的参考文献,此文献的来源及日期为49thMeeting of Inst. of Nav.Jun. 1993.)
在我国出版的文献中,“1993年,LAMBDA(最小二乘法多义法去相关校正)算法实现了整周多义性最佳求解,由PeterTeunissen完成。同年,实时动态(RTK)技术由美国天宝公司完成,实时动态定位精度达到厘米级,测量人员可以做地形拓扑、监视和实时测量。”(曹冲《卫星导航常用知识问答》,电子工业出版社,2010)
“一种堑新的GPS测量方法——载波相位实时差分法便应运而生了。1993年天宝公司率先推出的RTK(Real-Time kinematic)测量系统——GPS全站仪4000TD,将GPS测地技术推进到了一个新阶段。”(地矿测绘1996年第一期GPS专刊第十篇《GPS测地技术的进展与RTK》)
据公开发表的文献记载,我国石油物探行业于1994年首次在塔里木盆地石油物探测量中引进使用了RTK测量技术,随后在各行各业中逐步得到广泛的应用。
在我国出版的GPS测量专著中,最早较为全面介绍RTK测量系统及应用的是周忠谟等编著的《GPS卫星测量原理与应用》(1992年第一版,1997年再版),1995年12月再版说明中,对原版的内容作了许多重要的修改和补充,其中补充介绍了实时动态(RTK)GPS测量技术的基本原理与应用。
1999年,南方测绘推出中国首套国产双频RTK——NGK-500;2012年,中国第一台北斗RTK——南方S82c也在南方测绘问世。随着我国北斗卫星导航定位系统的运营服务,北斗RTK大量应用于测量生产实践之中,并且跨界拓展到了更多行业应用中。